Закон изменения движущих сил, обеспечивающих заданное движение тела. Реакции внешних опор.
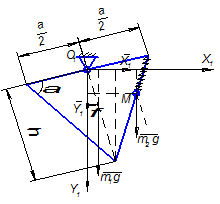
Рис.2 Определение реакций в опорах
Определим проекции реакций опоры на оси неподвижной декартовой системы координат O1x1y1 (рис. 2).
Запишем уравнение теоремы о движении центра масс для рассматриваемой механической системы в векторном виде:
![]() (1.2.1)
(1.2.1)
Проектируя уравнение (2.1) на оси системы координат О1x1y1 получаем
png">,
![]() (1.2.2)
(1.2.2)
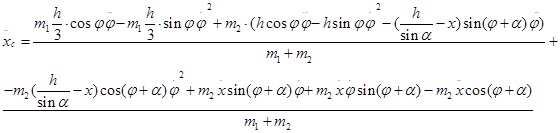
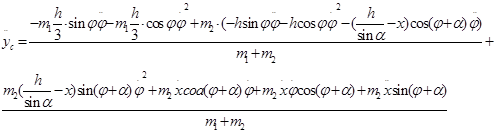
По известным формулам находим координаты центра тяжести системы,

 (1.2.4)
(1.2.4)
Дифференцируя уравнения 1.2.3,1.2.4, получим


Вычисляя вторые производные получим
 (1.2.5)
(1.2.5)
Подставляя (1.2.5) в уравнения (1.2.2), получаем проекции реакций в опоре О1 на оси неподвижной системы координат:
![]()

При этом мы учли, что ![]()
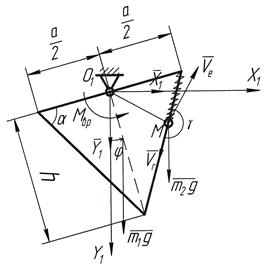
Рис.3 Определение вращательного момента
Применим теорему об изменении кинетического момента для определения внешнего момента, обеспечивающего равномерное движение ведущего звена механической системы. Выберем за ось z ось вращения:
![]() . (1.3.1)
. (1.3.1)
Определим кинетический момент рассматриваемой системы относительно оси Oz.
![]() ,
,
где ![]() - осевой момент инерции пластины,
- осевой момент инерции пластины, ![]() -угловая скорость вращения.
-угловая скорость вращения.
Шарик М совершает сложное движение- относительное вдоль желоба пластины(см. рис.3) со скоростью ![]() и переносное вместе с пластиной. Переносная скорость
и переносное вместе с пластиной. Переносная скорость ![]() перпендикулярна пластине и по модулю равна:
перпендикулярна пластине и по модулю равна:
![]() ,
,
где ![]()
Кинетический момент шарика относительно оси z равен
![]()
![]() ,
,
Кинетический момент всей системы равен
 (1.3.2)
(1.3.2)
Определим главный момент внешних сил относительно оси z. Реакции опор ![]() пересекают ось вращения и момент относительно этой оси не создают. Определим момент силы тяжести шарика и пластины:
пересекают ось вращения и момент относительно этой оси не создают. Определим момент силы тяжести шарика и пластины:![]()
![]()
![]()
Отсюда имеем:
![]() , (1.3.3)
, (1.3.3)
где Mвр.- внешний момент, обеспечивающий равномерное вращение пластины.
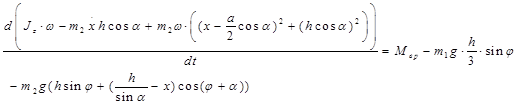
Подставляя 1.3.2, 1.3.3 в уравнение теоремы об изменении кинетического момента системы 1.3.1, получаем
 .
.
Учитывая, что ω=const получим:
![]()