Дифференциальные уравнения движения системы и их интегрирование
Составим уравнения движения с помощью уравнений Лагранжа 2-го рода. В выбранных обобщенных координатах ![]() и
и ![]() они принимают вид:
они принимают вид:
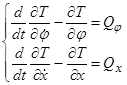 (2.1.1)
(2.1.1)
где ![]()
![]() - кинетическая энергия системы;
- кинетическая энергия системы;
png">- обобщенные силы, соответствующие обобщенным координатам
![]() и
и ![]() .
.
Найдем кинетическую энергию системы. Она состоит из кинетических энергий всех тел, входящих в систему:
![]()
Абсолютная скорость шарика ![]() равна геометрической сумме относительной и переносной скоростей (см. рис. 3), ее величина определяется по формуле:
равна геометрической сумме относительной и переносной скоростей (см. рис. 3), ее величина определяется по формуле:


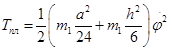
Тогда для кинетической энергии системы получим:
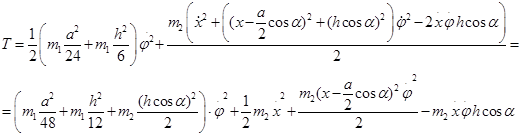 (2.1.2)
(2.1.2)
Введем обозначения:
Найдем все производные левой части уравнений (2.1.3):
![]()
![]()
![]()
![]()
![]()
![]()
Обобщенные силы можно определить двумя способами:
1. Фиксируем координату ![]() , даем виртуальное перемещение
, даем виртуальное перемещение ![]() , находим элементарную работу:
, находим элементарную работу:
![]()
![]()
Фиксируем координату ![]() , даем виртуальное перемещение
, даем виртуальное перемещение ![]() , находим элементарную работу:
, находим элементарную работу:
![]()
![]()
2. Вычислим потенциальную энергию системы:
![]()
Найдем обобщенные силы:
![]()
![]()
![]()
Подставив производные левой части уравнений (2.1.1) и обобщенные силы ![]() и
и ![]() в уравнения (2.1.1), получим дифференциальные уравнения движения системы:
в уравнения (2.1.1), получим дифференциальные уравнения движения системы:

Для решения системы дифференциальных уравнений движения механической системы проведем численное интегрирование на ЭВМ. Результаты численного интегрирования приведены в приложении №2.